ЗАПИСЬ НА ПРИЁМ 8(926)265-58-85 EMAIL: Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра.
История развития роботизированной хирургии и ее место в современной колопроктологии (обзор литературы).
Today, the robotic surgery is a modern revolutionary technology which is opened a qualitatively new stage in the surgery development in 21-st Century. High level of precision, reliability, functionality of robotic systems can extend the technical capabilities of the surgeons and improve quality of care. Contemporary colorectal surgery couldn’t exist without new technology and the quality of life after surgery directly depends on the quality of surgical care.
Ключевые слова: роботическая хирургия, лапароскопическая хирургия, онкохирургия, рак прямой кишки, рак ободочной кишки.
История появления роботической хирургии
В настоящее время роботы с успехом используются во многих отраслях промышленности: машиностроении, авиации, судостроении, космонавтике, оборонной сфере и сфере услуг, добыче полезных ископаемых, научно-исследовательской работе. Роботические системы применяются при работе в чрезвычайных и особо опасных условиях, где привлечение человеческих ресурсов сопряжено с высоким риском и угрозой жизни и здоровью, а также на тех предприятиях, где требуется высокая точность и четкая последовательность выполняемых манипуляций.
Несмотря на успешное применение роботических систем в промышленности, где алгоритм работы может быть просчитан до мельчайших подробностей, внедрение данной технологии в медицинскую практику сталкивалось с рядом сложностей, обусловленных мультифакторным непрерывным анализом и переменным алгоритмом работы. [1,2]
Тем не менее, эра, когда отсутствовала преемственность между технологией и практическим применением, уходит в прошлое. Новый виток развития малоинвазивных технологий в эндовидеохирургии связан с появлением и внедрением в клиническую практику роботической хирургии. В настоящее время хирургические роботические системы вышли на новый уровень развития технологии и с успехом применяются в телемедицине для выполнения трансконтинентальных оперативных вмешательств. [3,4]
Развитие роботической хирургии во многом обязано тем преимуществам и недостаткам, которые были присущи предшествующим хирургическим методикам. Преимущества вдохновляли на развитие технологии оперативных вмешательств по пути снижения травмотичности, а недостатки, являлись основной движущей силой, побуждали к поиску новых технологических решений, облегчающих работу хирурга.
С момента выполнения первой лапароскопической холецистэктомии в 1987г. список малоинвазивных вмешательств постоянно увеличивался, накапливался опыт и мастерство хирургов, сокращалась продолжительность оперативного вмешательства, совершенствовалось оборудование [5].
Преимущества малоинвазивной хирургии очень популярны среди хирургов, пациентов и страховых компаний: меньше длина разрезов, меньше риск развития инфекционных осложнений, короче сроки реабилитации и пребывание в больнице. Многие исследования показали, что после лапароскопических вмешательств снижаются сроки госпитализации, сокращается длительность временной нетрудоспособности, уменьшается болевой синдром, лучше косметический эффект [6-8]. Тем не менее, миниинвазивнная лапароскопическая хирургия имеет ряд недостатков. Наиболее известные из них: отсутствие тактильной обратной связи; ограничение движений хирурга техническими возможностями рабочего инструмента ( у рук хирурга 7 степеней свободы, а у лапароскопических манипуляторов – 4); отсутствие трехмерного изображения, мешающее координации, и снижающее маневренность. А при ряде манипуляций много дискомфорта приносит зеркальность изображения, что приводит к дискоординации движения рук и глаз оперирующего хирурга [9]. Большинство современных инструментов для лапароскопической хирургии имеют 4 степени свободы движения, в то время как человеческая рука – 7. К тому же отсутствие тактильной чувствительности тканей делает любую манипуляцию в значительной степени зависимой от качества визуализации. Наконец, физиологический тремор руки хирурга легко передается через длинный жесткий инструмент на его рабочую часть, создавая значительные трудности при выполнении ряда прецизионных манипуляций [10]. Мотивация разработки хирургических роботов коренится в желании преодолеть ограничения существующих лапароскопических технологий и расширить преимущества малоинвазивной хирургии.
С момента своего создания, хирургические роботы были задуманы чтобы расширить возможности хирургов за пределы обычной лапароскопии. История робототехники в хирургии начинается с робота Puma 560, используемой в 1985 году Kwoh с коллегами для выполнения нейрохирургических биопсии с высокой точностью [6,11]. Три года спустя, Davies с коллегами провели трансуретральную резекцию предстательной железы с помощью робота Puma 560 [12]. В конечном итоге, эта система привела к созданию PROBOT - робота, разработанного специально для трансуретральной резекции простаты. Параллельно с разработкой и внедрением PROBOT, компания Ltd. of Sacramento, штат Калифорния, разрабатывает ROBODOC - роботизированную систему, предназначенную для высокоточных операций на тазобедренных суставах [1]. ROBODOC был первым хирургическим роботом, одобренным FDA (Food and Drug Administration). Кроме того, с середины 1980-х годов группа исследователей из научно-исследовательского центра Ames (NASA), работающие в сфере виртуальной реальности, заинтересовались возможностью применения медицинских роботических систем в космических программах в рамка разрабатываемой программы телемедицины [1]. Эта концепция «Телехирургии» стал одной из главных движущих сил в развитии хирургических роботов. В начале 1990-х, команда ученых из научно-исследовательского центра Ames NASA объединилась с научно-исследовательским институтом Стэнфорда (SRI). Совместная работа с новыми экспертами в области разработки виртуальных роботических систем привела к созданию модели манипулятора – аналога человеческой кисти хирурга. Одной из их основных целей данного проекта была возможность хирургу почувствовать свою работу на пациенте, находясь на удалении от него. В это же время к разработчикам медицинских роботов присоединилась команда хирургов, что позволило учесть все плюсы и минусы лапароскопических и традиционных операций и создать роботическую хирургическую систему с учетом этих нюансов.
Армия США заметив работу SRI, заинтересовалось возможностью сокращения безвозвратных потерь на поле боя за счет применения хирургических роботических систем в боевых точках, в то время как хирург-оператор находится на удалении тот места непосредственных событий и управляет роботической системой по средствам дистанционного управления с использованием элементов телемедицины [1]. При финансовой поддержке армии США, была разработана система, посредствам которой раненый солдат загружался в транспортное средство с роботизированным хирургическим оборудованием, а в соседнем мобильном хирургическом госпитале – хирург, управляя роботической системой, выполнял оперативные вмешательства. Эта система, позволяла оказывать высокотехнологичную помощь непосредственно на поле боя, миную этап эвакуации. Данная разработка была успешно продемонстрирована на животных моделях.
Часть хирургов и инженеров, принимающих участие в разработке и создании хирургических роботических систем, создали частные предприятия, которые занимались созданием роботических систем для применения в гражданских медицинских центрах [1]. Компания Computer Motion Inc из Санта-Барбара, штат Калифорния, использовала стартовый капитала, предоставленный армией США для развития Автоматизированной системы эндоскопического оптимального позиционирования (AESOP), представляющую собой роботический манипулятор для управления эндоскопической камерой по средствам голосовой активации. Вскоре после этого проект AESOP был продан компании Интегрированные Хирургические Системы (сейчас Intuitive Surgical) из Маунтин-Вью, штат Калифорния. Эта система подверглась радикальному видоизменению и была воссоздана в качестве хирургической системы Да Винчи. В течение года, компанией была поставлена в производство роботическая система Zeus.
Современные хирургические роботические системы
На сегодняшний день активно развивается множество предприятий, занимающихся созданием и применением роботических систем. Schurr с коллегами в университете Eberhard Karls на кафедре минимально инвазивной хирургии разработали роботическую систему - манипулятор под называют ARTEMIS [13]. Эта система состоит из 2 рук-манипуляторов, которые контролируются хирургом в консоли управления. Dario с коллегами в лаборатории MiTech Scuola Superiore Sant'Anna в Италии разработали прототип роботизированной системы для выполнения компьютерной колоноскопии [14]. Эта система обеспечивает те же функции, что и обычная эндоскопическая колоноскопия. Устройство представляет собой робота похожего на гусеницу, передвигающуюся с помощью вакуумного отсоса. Управление данным комплексом осуществляется врачом-оператором, кроме того, в роботическое устройство были интегрированы эндоскопические манипуляторы. Данная система позволяла расширить возможности применения эндолюминальной диагностики и давала возможность выполнения небольших хирургических манипуляций. В это же время другие лаборатории занимались разработкой манипуляторов для минимально инвазивной хирургии с возможностью тактильных ощущений на основе обратной связи, а также разработкой визуального управления с тактильной обратной связью для роботизированной хирургии.
Итогом данных работ стало создание систем PRODOC, ROBODOC, AESOP (Computer Motion Inc, Санта-Барбара, Калифорния), эндоскопической роботическая система с голосовым управлением, и интегрированным роботическим хирургический комплексом Da Vinci (Intuitive Surgical Inc, Mountain View, CA), Zeus (Computer Motion Inc., Санта-Барбара, Калифорния).

Рис. 1. Роботическая система Da Vinci.
Системы да Винчи и Zeus похожи в своих возможностях, но отличаются по своим подходам к роботизированной хирургии. Обе системы являются интегрированными комплексами состоящие из рабочей части ис нескольких манипуляторов, а консоль управления располагается отдельно, и связана с манипуляторным блоком оптоволоконной связью. Система да Винчи (рис. 1) состоит из 3-х основных компонентов: консоли с двухканальной 3-х чиповой камерой и энергетическими установками, главной консоли – рабочего места оперирующего хирурга, рабочей части с манипуляторами [1]. Камера за счет 2 видеоканалов способна создавать 3-х мерное изображение на экране консоли оперирующего хирурга. Консоль управления состоит из монитора, на который передается 3–х мерное изображение; педали для управления электрокоагуляцией и фокусом видеокамеры, 2 манипуляторов на сервоприводах для управления роботическими руками-манипуляторами рабочей части системы [6]. Связь между консолью хирурга и рабочей частью передается по средствам оптоволоконных кабелей. Манипуляторы рабочей части имеют 7 степеней свободы. Сочетание 3-х мерного изображения и 7 степеней свободы роботических инструментов позволяют оперирующему хирургу преодолеть барьер виртуальной реальности и почувствовать рабочий инструмент роботического комплекса продолжением своих собственных рук.
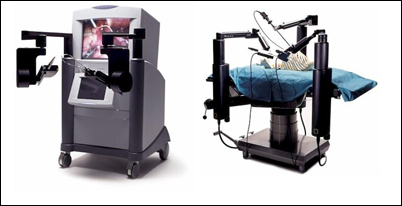
Рис. 2. Роботическая система Zeus
Система Zeus состоит из консоли управления хирургом и 3-х рук – манипуляторов, которые крепятся к операционному столу (рис. 2). Правый и левый манипуляторы повторяют руки хирурга, а третий – AESOP – роботическая рука с голосовым управлением для навигации эндоскопа. В системе Zeus, консоль управления также состоит из монитора и эргономично расположенных ручек-манипуляторов для управления роботическими инструментами. Система позволяет использовать как традиционные инструменты для лапароскопической хирургии, так и инструменты с артикулирующей рабочей частью, имеющих 7 степеней свободы.
Преимущества роботизированной хирургии
Поскольку роботические хирургичекие комплексы изначально задумывались с целью преодоления недостатков традиционной лапароскопической хирургии, они имеют ряд важных преимуществ: высокую маневренность инструментов, воссоздают правильную координацию рук и глаз оперирующего хирурга, а также имеют улучшенную систему визуализации. Кроме того, эти системы позволяют выполнить технически трудновыполнимые и длительные операции в более комфортных для хирурга условиях, тем самым повышая безопасность вмешательства.
Робототехнические системы позволяют добиться высокой точности и легкости оперирования за счет использования нескольких технологических решений. Во первых, сами инструменты с 7 степенями свободы позволяют более точно пространственно манипулировать в пределах операционного поля; во вторых, система управления манипуляторами создана максимально естественно и имитируют естественное движение рук хирурга; в третьих, за счет применения специальных компьютерных программ и фильтров удалось убрать с рабочих инструментов эффект интенционного тремора; в четвертых, система позволяет масштабировать движения манипуляторов таким образом, что большие движения на консоли управления преобразуются в микроскопические внутри операционного поля.
Другим важным преимуществом является восстановление надлежащей координации рук и глаз и эргономичное положение хирурга. Кроме того, робототехнические системы лишены эффекта опоры, когда движение манипуляторов происходят вокруг точки опоры в рабочем канале троакар, делая управление инструментом максимально интуитивным. Комфортное расположение хирурга в управляющей консоли позволяет устранить позиционные нагрузки повысить комфортность.
По мнению большинства авторов, применение 3-х мерного изображения наряду со стабилизацией и легкого позиционирования камерой позволяет значительно улучшить визуализацию и повысить возможность визуального восприятия тканей. Таким образом, повышение качества визуализации наряду с широким спектром степеней свободы рабочих манипуляторов и интуитивно-понятным управлением позволяет добиться максимальной эффективности, четкости, стабильности и высочайшего качества работы оперирующего хирурга, что чрезвычайно важно при выполнении оперативных вмешательств с элементами микрохирургической техники в условиях ограниченного пространства и длительных реконструктивных операций.
Недостатки хирургических роботизированных комплексов
Наряду с преимуществами, существуют и недостатки роботических хирургических систем. Прежде всего стоит отметить, что роботизированная хирургия является новой технологией, и оценка ее эффективности – дело времени. На сегодняшний день ведется много исследований по эффективности и безопасности применения этих систем в различных направлениях современной медицины. Многие процедуры пересматриваются с позиций их оптимизации к использованию роботизированной хирургии. Тем не менее, время, скорее всего, исправить эти недостатки.
Другой недостаток этих систем - их стоимость. Цена в миллион долларов является неподъемной для многих медицинских центров. [9]. Также актуальным вопросом является модернизация системы: сколько больница и медицинские организации должны будут потратить на модернизацию и как часто? В любом случае, чтобы оправдать покупку этих комплексов, необходимо их широкое междисциплинарного использование.
Так же важным недостатком является габариты этих систем. Обе платформы имеют относительно большие размеры и зачастую требуют переоборудования и перестройки операционного блока. Таким образом, стоимость самих роботизированных систем совместно с переоборудованием и реконструкцией операционного зала, обучением сотрудников делают их чрезвычайно дорогой технологией.
Одним из потенциальных недостатков - является отсутствие унифицированных приборов для совместимой работы между различными устройствами. Отсутствие ряда традиционных лапароскопических инструментов увеличивает зависимость от ассистента выполнение ряда хирургических вмешательств [6]. Это, однако, является временным недостаток, так как новые технологии развиваться в направлении устранения этих дефектов.
Большинство из отмеченных недостатков будут устранены ближайшем будущем, также время рассудит оправдывает ли эффективность использования роботизированной хирургии ее стоимость. Если стоимость этих систем останется высокой, маловероятно, что в каждом операционном блоке будет установлена роботическая система и, таким образом, маловероятно, что они будут использоваться для рутинных операций.
Применение роботических систем в современной клинической практике
В настоящее время для хирургических вмешательств одобрено несколько робототехнические системы. Система ROBODOC используется для оперативных вмешательств при замене тазобедренного сустава. Компания Computer Motion Inc. of Goleta, Калифорния, представляет на рынке 2 системы: AESOP - представляет собой роботизированный эндоскоп с 7 степенями свободы и голосовым управлением. Эта система может быть использована в любой лапароскопической операции для повышения эффективности контроля хирургом видеоизображение операционного поля; система Zeus и система Da-Vinci были разработаныдля выполнении различных лапароскопических операций, в том числе холецистэктомии, операциях на митральном клапане, радикальной простатэктомии, гинекологических операциях, операциях на желудочно-кишечном тракте, нефрэктомий и трансплантации почек. Типы и количество операций выполняемых с применением роботических систем стремительно растет, поскольку все больше учреждений приобретают эти системы. Пожалуй, самым ярким примером применения этих систем является полностью эндоскопическое аортокоронарное шунтирование, процедура, которую ранее невозможно было выполнить с применением лапароскопической техники.
Применение роботической хирургии в современной колопроктологии
Развитие роботической колоректальной хирургии во многом обязано внедрению в практическую медицину роботической системы Da Vinci. Важными преимуществами данной платформы являются: стабильность и высокая четкость изображения, отсутствие интенционного тремора роботических манипуляторов, интуитивно понятные органы управления, наличие 7 степеней свободы манипуляторов, интегрированная информационная система и т.д. Несмотря на эти технологические превосходства, большинство существующих исследований не отмечают преимуществ по непосредственным результатам между роботическими и лапароскопическими операциями.
Первой роботической системой для использования в хирургической практике была автоматизированная эндоскопическая система оптимального позиционирования AESOP, (Computer Motion, Santa Barbara, CA, USA). В 1994г. данная система была одобрена FDA (Food and Drug Administration) для клинического применения в качестве роботического манипулятора эндоскопической камеры. После этого компания Computer Motion разработала роботическую систему Zeus с рабочими манипуляторами и консолью управления для хирургапаралельно с этим событием, роботическая система Да Винчи (Intuitive Surgical Inc., Sunnyvale, CA, USA) стала первой телероботической системой, одобренной FDA для выполнения внутриполостных оперативных вмешательств в США. Первая роботическая операция была выполнена в 2001г.[15]. В те годы хирурги в основном использовали для выполнения операций систему Да Винчи. В 2001г Weber et al. [16] доложили о выполнении 3 роботических правосторонних гемиколэктомий и сигмоидэктомий по поводу доброкачественных опухолей с использованием платформы Да Винчи. В 2003г. Delaney et al. [17] сравнили роботическую лапароскопически-ассистированную колэктомию с традиционной лапароскопической колэктомией при которых результаты оказались сопоставимы. Тем не менее, за период с декабря 2001 по апрель 2002гг было выполнено только 6 роботических колэктомий, хотя предварительные данные говорили о возможности и безопасности данной процедуры с использованием роботической техники. В 2004г. D'Annibale et al. [18] доложили о выполнении 53 роботических операций на толстой кишке за период с мая 2001 по май 2003гг., в том числе 22 – по поводу злокачественных новообразований. Авторы сделали вывод, о сопоставимости результатов роботических и лапароскопических вмешательств. В германии в 2005г. были опубликованы данные выполнения 5 роботических операций на толстой кишке [19].
Первая роботическая операция на прямой кишке с тотальной мезоректумэктомией была выполнена Pigazzi at al. в 2006г. [20]. Он сравнил непосредственные результаты роботической тотальной мезоректумэктомии с традиционной лапароскопической методикой. Результаты его наблюдений показали, что роботическая низкая передняя резекция прямой кишки с тотальной мезоректумэктомией и сохранением автономной нервной системы выполнима и безопасна.
В эру роботических операций на толстой кишке, Rawlings et al.[21] продемонстрировали результат выполнении 30 роботических операций: 17 – правосторонних гемиколэктомий, 13 – передних резекций прямой кишки. Авторы сделал вывод о технической возможности выполнения данных вмешательств с использованием роботической платформы Да Винчи. В 2007г. они доложил сравнительные результаты роботических и лапароскопических вмешательств, при этом группы сравнения были сопоставимы [22].
В 2008г. Pigazzi et al. [20] публикует результаты первых 6 роботических тотальных мезоректумэктомий и сравнивает их с традиционными лапароскопическими, он также докладывает о выполнении 39 операций по поводу рака прямой кишки [23]. В заключении данной работы авторы так же делают вывод о безопасности выполнения роботических операций при раке прямой кишки.
В Азии в 2007г., Baik et al. [24] доложил первый Азиатский опыт выполнения роботической тотальной мезоректумэктомии при раке прямой кишки. Затем авторы доложили первый опыт выполнения роботической симультанной тотальной мезоректумэктомии при раке прямой кишки и гистерэктомиии по поводу миомы матки [25]. Проанализировав результаты симультанных вмешательств, авторы так же заключают, что данные вмешательства безопасны и технически выполнимы с использованием роботической системы Да Винчи. В Азии первая роботическая экстирпация прямой кишки была выполнена в Гонконге в августе 2006г. [26-28].
В 2008г. Spinoglio et al. [29] доложил первый опыт выполнения 50 роботических операций на толстой кишке. В исслеждовании проведено сравнение 50 роботических и 161 лапароскопических вмешательств. Подводя итог, автор делает вывод о том, что роботические операции выполнимы и безопасны, но более продолжительны по времени.
Первое проспективное рандомизированное исследование, сравнивающее результативность выполнения роботической и лапароскопической низкой передней резекции было запущено Baik et al. [30] в 2006г. Непосредственные результаты опубликованы в 2008г.: были сравнены 18 роботических и 18 лапароскопическими низких передних резекций. Результаты продемонстрировали возможность и безопасность выполнения робот-ассистированных вмешательств, а также улучшение качества мезоректумэктомии при оценке удаленного материала, хотя статистически значимых различий получено не было.
Роботизированные операции на ободочной кишке
Начиная с Weber et al., первым выполнившем в 2001г. роботическую колэктомию, количество робот-ассистированных операций на ободочной кишке увеличивалось с каждым годом [15,16]. Предыдущие клинические исследования показали техническую выполнимость и безопасность данной операции не только при доброкачественных, но и при злокачественных новообразованиях толстой кишки [18].
Группа ученых во главе со Spinoglio [29] сравнили результаты 18 правосторонних и 10 левосторонних роботических гемиколэктомий с 50 лапароскопическими правосторонними и 73 левосторонними гемиколэктомиями. В исследовании также были проанализированы 19 роботических передних резекций прямой кишки и 3 случая других вмешательств на толстой кишке. Авторы делают вывод, что роботические вмешательства выполнимы и безопасны, однако требуют больше времени по сравнению с лапароскопическими операциями. Аналогичный вывод был получен Delaney et al. [17] еще перед исследованием Spinoglio et al.[29]. Более того, Rawlings et al.[22] проанализировал клинические результаты роботических и лапароскопических операций на ободочной кишке. Результаты работы продемонстрировали значительное увеличение времени выполнения роботической правосторонней гемиколэктомии по сравнению с лапароскопической, непосредственные результаты были также сопоставимы. Увеличение длительности роботической правосторонней гемиколэктомии автор объяснил длительность формирования интракорпорального шовного анастомоза в отличии от экстракорпорального, при выполнении традиционной лапароскопической операции. Внутрикорпоральное формирование анастомоза может быть ускорено при использовании роботической шовной системы ENDOWRIST. Тем не менее, нет доказательств преимущества интракорпорального анастомоза над экстракорпоральным при выполнении восстановления непрерывности ободочной кишки. Согласно приведенным выше докладам, несмотря на технические преимущества роботической хирургии, преимуществ во времени вмешательства или качестве течения раннего послеоперационного периода продемонстрировано не было. Для того чтобы разобраться с этим фактом необходимо разобрать разберем все преимущества и недостатки роботической хирургии по отдельности и сравнить их с традиционной лапароскопической техникой. Одной из анатомических особенностей при выполнении резекций ободочной кишки является большая площадь операционного поля. Преимуществом роботической системы является высокое качество визуализации за счет применения 2-канальных 3-х чиповых камер, позволяющих передавать 3-х мерное изображение с возможностью 10-кратного увеличения. Тем не менее, стандартного 2-кратного увеличения при лапароскопической хирургии может быть вполне достаточно при выполнении правосторонней гемиколэктомии, так как операционное поле достаточно большое.
В роботической системе у хирурга имеет полный контроль над камерой и он может корректировать ее положение с помощью педали во время операции, обеспечивая наилучший вид, кроме того, камера жестко фиксирована и лишена эффекта интенционного дрожания, но хорошо обученный ассистент способен достаточно четко и эффективно управлять камерой, руководствуясь командами оперирующего хирурга.
Дополнительные степени свободы роботического инструмента обеспечивают высокую маневренность и четкость движений при выполнении диссекции тканей, позволяя выполнять ее в любых труднодоступных местах. Тем не менее, тракция и противотракция тканей ассистентом в условиях широкого операционного поля, не ограниченного костными анатомическими структурами, может в полной мере скомпенсировать недостаток степеней свободы лапароскопических инструментов.
Важным условием оценки возможности выполнение роботических операций при онкологической патологии толстой кишки является анализ непосредственных результато.
Наиболее важным показателем при оценке качества оперативного вмешательства у больных с онкологической патологией является количество удаленных лимфатических узлов и возможность выполнения резекции опухоли единым блоком (en bloc). Исследование COST показало отсутствие преимуществ лапароскопической техники над традиционными открытыми вмешательствами по общей и безрецидивной выживаемости, также было продемонстрировано отсутствие статистически достоверных отличий по количеству удаленных лимфатических узлов. [31]. В исследовании COST также продемонстрировано, что стандартная открытая техника позволяет быстрее определить латеральный край резекции и выявить измененные лимфатические узлы, однако достоверных качественных различий по этим параметрам с лапароскопическим методом также не установлено [30]. Таким образом, мы можем постулировать, что технические преимущества системы Да Винчи также не способны улучшить выживаемость по сравнению с открытыми и лапароскопическими оперативными вмешательствами.
На данный момент роботическая хирургия находится в зачаточном состоянии и не может обеспечить улучшения онкологических результатов по сравнению со стандартными техниками. Необходимо внедрить множество передовых разработок для достижения значимых преимуществ роботической хирургии, что наряду с достижениями современной хирургии может улучшить качество и продолжительность жизни больных с онкологической патологией толстой кишки.
Роботизированные операции на прямой кишке
Роботическая низкая передняя резекция – относительно редкая операция по сравнению с остальными вмешательствами на толстой кишке [15,18,19-22,24,25,32,33]. Хирургическая техника при операциях на прямой кишке является наиболее сложной по сравнению с другими вмешательствами, что обусловлено ограниченностью пространства полостью малого таза и наличием большого количества важных анатомических структур в этой области. При раке прямой кишки техника выполнения тотальной мезоректумэктомии (TEM) является ключевой в обеспечении радикальности оперативного пособия [34-36]. Принцип TEM заключается в фасциально-футлярном удалении прямой кишки с мезоректальной клетчаткой, при этом плоскость диссекции должна проходить в слое между пресакральной фасцией и собственной фасцией прямой кишки. Данная техника может быть технически трудновыполнимой в условиях ограниченного пространства малого таза. Очень часто размер полости таза является ключевым фактором, обуславливающим качество выполнения тотальной мезоректумэктомии при операциях на прямой кишке[37]. Оценка эффективности выполненного оперативного вмешательства может быть проанализирована путем исследования объема удаленных лимфатических узлов и качества выделения мезоректальной фасции. Наиболее важным фактором при этом является целостность собственной фасции прямой кишки, что играет значительную роль в улучшении показателей безрецидивной выживаемости у пациентов локализованным раком прямой кишки [38].
Роботическая система Да Винчи позволяет добиться ряда преимуществ при выполнении прецизионной диссекции в условиях ограниченного пространства полости малого таза. Наличие 3-мерного изображения, отсутствие интенционного дрожания рабочих инструментов, высокая точность и аккуратность движения являются ключевыми звеньями успешного выполнения роботических операций на прямой кишке. Группа ученых во главе с Baik [39], проанализировав результаты выполнения тотальной мезоректумэктомии при раке прямой кишки, пришли к выводу, что роботическая хирургия в данном направлении имеет максимальное количество преимуществ по сравнению с традиционной открытой и лапароскопической операцией. Тем не менее, к настоящему времени существует не так много публикации по оценке эффективности роботической хирургии при заболеваниях прямой кишки: D’Annibale et al. [18] сравнил результаты выполнения 12 роботических резекций прямой кишки с традиционными лапароскопическими вмешательствами. Данное исследование продемонстрировало сопоставимость непосредственных результатов двух методов. Два года спустя, Pigazzi et al. [20] оценили результаты 6 роботических и 6 лапароскопических низких передних резекций прямой кишки. Результаты исследования также продемонстрировали отсутствие различий между данными двумя методами. Кроме того авторами были проанализированы непосредственные результаты роботической тотальной мезоректумэктомии при низкой резекции прямой кишки у 39 пациентов, данные также подтверждали возможность и безопасность выполнения данной процедуры с применением роботической техники [23]. В тоже время Baik et al. [30] выполнили проспективное рандомизированное исследование по сравнению лапароскопических и роботизированных низких резекций прямой кишки. Авторы проанализировали интраоперационные и послеоперационные осложнения и патморфологическую оценку качества удаленного препарата при выполнении 18 роботических и 18 лапароскопических операций, результаты оказались сопоставимы. При патморфологической оценке количества удаленных лимфатических узлов, а также частоте положительного края резекции достоверных отличий получено не было, однако при микроскопической оценке качества мезоректумэктомии в 17 случаях продемонстрировано более качественное ее выполнение в группе пациентов, перенесших роботическую операцию. Достижение более прецизионного выделения при выполнении роботической тотальной мезоректуимэктомии может стать преимуществом данного метода при выполнении операций на прямой кишке.
Тем не менее, в настоящее время большинство исследований, посвященных анализу результатов выполнения роботических низких резекций прямой кишки, находятся в начальной стадии. Кроме того, количество включенных пациентов остается достаточно небольшим, чтобы выполнить полноценный анализ с низкой статистической погрешностью полученных результатов. Необходимо выполнение полномасштабных многоцентровых рандомизированных контролируемых исследований для полноценной и точной оценки всех преимуществ и недостатков роботизированных оперативных вмешательств при операциях на прямой кишке.
Заключение
Многие преимуществ роботизированной хирургии гарантируют ее дальнейшее развитие. Мобильность, интуитивность управления, наличие широкого спектра степеней свободы роботических манипуляторов, отсутствие интенционного дрожания, комфортность расположения оперирующего хирурга – все эти преимущества важны при выполнении техники микрохирургии. Кроме того, роботизированные системы являются информационными системами и имеют возможность взаимодействия между собой, а также могут интегрировать многие технологии, которые разрабатываются в настоящее время и уже используется в современных операционных блоках. Одной из захватывающих возможностей является совмещение результатов предоперационного КТ или МРТ исследования с картинкой операционного поля для улучшения навигации хирургом. Эти данные также могут быть использованы для симуляции и отработки методики перед оперативным вмешательством. Современные робототехнические системы также позволяют интраоперационно в режиме реального времени проводить консультации, обучение и оценку навыков хирургов по средствам моделирования.
Хотя роботизированная хирургия еще находится в зачаточном состоянии, она уже смогла положительно зарекомендовать себя в тех направлениях, где обычная лапароскопическая техника была недостаточно применима. В любом случае, робототехника направлена на улучшение и расширение лапароскопических оперативных вмешательств, продвижение хирургической техники в эпоху цифровых технологий. Кроме того, она имеет потенциал для расширения хирургических методов лечения за пределы человеческих возможностей.
Будущее робототехники в хирургии ограничивается только воображением. Многие будущие "достижения" уже изучаются. Возможности для улучшения и развития роботических систем ограничены только воображением и стоимостью.
Список литературы
1. Satava RM. Surgical robotics: the early chronicles: a personal historical perspective. Surg Laparosc Endosc Percutan Tech. 2002;12:6–16.
2. Felger JE, Nifong L. The evolution of and early experience with robot assisted mitral valve surgery. Surg Laparosc Endosc Percutan Tech. 2002;12:58–63.
3. Marescaux J, Leroy J, Rubino F, et al. Transcontinental robot-assisted remote telesurgery: feasibility and potential applications. Ann Surg. 2002;235:487–492.
4. Cheah WK, Lee B, Lenzi JE, et al. Telesurgical laparoscopic cholecystectomy between two countries. Surg Endosc. 2000;14:1085.
5. Jones SB, Jones DB. Surgical aspects and future developments in laparoscopy. Anesthiol Clin North Am. 2001;19:107–124.
6. Kim VB, Chapman WH, Albrecht RJ, et al. Early experience with telemanipulative robot-assisted laparoscopic cholecystectomy using Da Vinci. Surg Laparosc Endosc Percutan Tech. 2002;12:34–40.
7. Fuchs KH. Minimally invasive surgery. Endoscopy. 2002;34:154–159.
8. Allendorf JD, Bessler M, Whelan RL, et al. Postoperative immune function varies inversely with the degree of surgical trauma in a murine model. Surg Endosc. 1997;11:427–430.
9. Satava RM, Bowersox JC, Mack M, et al. Robotic surgery: state of the art and future trends. Contemp Surg. 2001;57:489–499.
10. Prasad SM, Ducko CT, Stephenson ER, et al. Prospective clinical trial of robotically assisted endoscopic coronary grafting with 1 year follow-up. Ann Surg. 2001;233:725–732.
11. Kwoh YS, Hou J, Jonckheere EA, et al. A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery. IEEE Trans Biomed Eng. 1988;35:153–161.
12. Davies B. A review of robotics in surgery. Proc Inst Mech Eng. 2000;214:129–140.
13. Schurr MO, Buess GF, Neisius B, et al. Robotics and telemanipulation technologies for endoscopic surgery: a review of the ARTEMIS project. Advanced robotic telemanipulator for minimally invasive surgery. Surg Endosc. 2000;14:375–381.
14. Dario P, Corrozza MC, Peitrabissa A. Development and in vitro testing of a miniature robotic system for computer-assisted colonoscopy. Comput Aided Surg. 1999;4:1–14.
15. Ballantyne GH, Merola P, Weber A, Wasielewski A. Robotic solutions to the pitfalls of laparoscopic colectomy. Osp Ital Chir 2001;7:405-12.
16. Weber PA, Merola S, Wasielewski A, Ballantyne GH. Telerobotic-assisted laparoscopic right and sigmoid colectomies for benign disease. Dis Colon Rectum 2002; 45:1689-94; discussion 1695-6.
17. Delaney CP, Lynch AG, Senagore AJ, Fazio VW. Comparison of robotically performed and traditional laparoscopic colorectal surgery. Dis Colon Rectum 2003;46:1633-9.
18. D’Annibale A, Morpurgo E, Fiscon V, Trevisan P, Sovernigo G, Orsini C, et al. Robotic and laparoscopic surgery for treatment of colorectal disease. Dis Colon Rectum 2004;47:2162-8.
19. Braumann C, Jacobi CA, Menenakos C, Borchert U, Rueckert JC, Mueller JM. Computer-assisted laparoscopic colon resection with the Da Vinci System: our first experiences. Dis Colon Rectum 2005;48:1820-7.
20. Pigazzi A, Ellenhorn JD, Ballantyne GH, Paz IB. Roboticassisted laparoscopic low anterior resection with total mesorectal excision for rectal cancer. Surg Endosc 2006; 20:1521-5.
21. Rawlings AL, Woodland JH, Crawford DL. Telerobotic surgery for right and sigmoid colectomies: 30 consecutive cases. Surg Endosc 2006;20:1713-8.
22. Rawlings AL, Woodland JH, Vegunta RK, Crawford DL. Robotic versus laparoscopic colectomy. Surg Endosc 2007;21:1701-8.
23. Hellan M, Anderson C, Ellenhorn JD, Paz B, Pigazzi A. Short-term outcomes after robotic-assisted total mesorectal excision for rectal cancer. Ann Surg Oncol 2007; 14:3168-73.
24. Baik SH, Kang CM, Lee WJ, Kim NK, Sohn SK, Chi HS, et al. Robotic total mesorectal excision for the treatment of rectal cancer. J Robotic Surg 2007;1:99-102.
25. Baik SH, Kim YT, Ko YT, Kang CM, Lee WJ, Kim NK, et al. Simultaneous robotic total mesorectal excision and total abdominal hysterectomy for rectal cancer and uterine myoma. Int J Colorectal Dis 2008;23:207-8.
26. Ng SS, Lee JF, Yiu RY, Li JC, Hon SS. Teleroboticassisted laparoscopic abdominoperineal resection for low rectal cancer: report of the first case in Hong Kong and China with an updated literature review. World J Gastroenterol 2007;13:2514-8.
27. Kang CM, Chi HS, Hyeung WJ, Kim KS, Choi JS, Lee WJ, et al. The first Korean experience of telemanipulative robot-assisted laparoscopic cholecystectomy using the da Vinci system. Yonsei Med J 2007;48:540-5.
28. Choi SB, Park JS, Kim JK, Hyung WJ, Kim KS, Yoon DS, et al. Early experiences of robotic-assisted laparoscopic liver resection. Yonsei Med J 2008;49:632-8.
29. Spinoglio G, Summa M, Priora F, Quarati R, Testa S. Robotic colorectal surgery: first 50 cases experience. Dis Colon Rectum 2008;51:1627-32.
30. Baik SH, Ko YT, Kang CM, Lee WJ, Kim NK, Sohn SK, et al. Robotic tumor-specific mesorectal excision of rectal cancer: short-term outcome of a pilot randomized trial. Surg Endosc 2008;22:1601-8.
31. Clinical Outcomes of Surgical Therapy Study Group. A comparison of laparoscopically assisted and open colectomy for colon cancer. N Engl J Med 2004;350:2050-9.
32. Giulianotti PC, Coratti A, Angelini M, Sbrana F, Cecconi S, Balestracci T, et al. Robotic in general surgery: personal experience in a large community hospital. Arch Surg 2003;138:777-84.
33. Vibert E, Denet C, Gayet B. Major digestive surgery using a remote controlled robot: the next revolution. Arch Surg 2003;138:1002-6.
34. Heald RJ, Husband EM, Ryall RD. The mesorectum in rectal cancer surgery - the clue to pelvic recurrence? Br J Surg 1982;69:613-6.
35. Havenga K, DeRuiter MC, Enker WE, Welvaart K. Anatomical basis of autonomic nerve-preserving total mesorectal excision for rectal cancer. Br J Surg 1996;83: 384-8.
36. Enker WE, Thaler HT, Cranor ML, Polyak T. Total mesorectal excision in the operative treatment of carcinoma of the rectum. J Am Coll Surg 1995;181;335-46.
37. Baik SH, Kim NK, Lee KY, Sohn SK, Cho CH, Kim MJ, et al. Factors influencing pathologic results after total mesorectal excision for rectal cancer: analysis of consecutive 100 cases. Ann Surg Oncol 2008;15:721-8.
38. Nagtegaal ID, van de Velde CJ, van der Worp E, Kapiteijn E, Quirke P, van Krieken JH; Cooperative Clinical Investigators of the Dutch Colorectal Cancer Group. Macroscopic evaluation of rectal cancer resection specimen: clinical significance of the pathologist in quality control. J Clin Oncol 2002;20:1729-34.
39. Baik SH, Lee WJ, Rha KH, Kim NK, Sohn SK, Chi HS, et al. Robotic total mesorectal excision for rectal cancer using four robotic arms. Surg Endosc 2008;22:792-7.
The history of robotic surgery and its current place in modern colorectal surgery (literature review).
Today robotic surgery is a modern revolutionary technology which is opened a qualitatively new stage in the development of surgery in the 21st century. High level of precision, reliability, functionality of robotic systems can extend the technical capabilities of the surgeons and improve quality of care. Contemporary colorectal surgery couldn’t exist without new technology and the quality of life after surgery directly depends on the quality of surgical care.
Key words: robotic surgery, laparoscopic surgery, rectal cancer, colon cancer.